
ReGait++
This project developed new solutions to restore walking in people with Spinal Cord Injury such as a multidirectional bodyweight support system (Rysen), a textile-powered lower-limb exoskeleton (MyoSuit), and an implantable electrode array to activate the human spinal cord with epidural electrical stimulation (EES). The end goal of the project was to define a rehabilitation program enabled by the Rysen, the MyoSuit and EES, and in parallel to develop an all-soft, wireless brain-spine interface that alleviates gait and balance deficits in non-human primate models of spinal cord injury, Parkinson’s disease and stroke.
Labs involved: G. Courtine (EPFL), S. Lacour (EPFL), S. Micera (EPFL), R. Riener (ETH Zurich)
Rysen
RYSEN is a robotic body-weight support system to assist patients with leg impairments such as spinal cord injury and stroke. It allows patients to operate within a wide area and to be tested in a wide range of activities, such as standing and walking, walking along a slalom or a horizontal ladder light projected onto the floor.
The researchers have developed an algorithm to measure how the patient is walking and update the support given to them as they complete their training.
Related publications
- F.L. Haufe, P. Wolf, R. Riener and M. Grimmer, “Biomechanical effects of passive hip springs during walking”, J. of Biomechanics, vol. 98, p. 10943, Jan. 2020.
- F.L. Haufe, R.H. Hassani, R. Riener and P. Wolf, “The InSight Crutches: Analyzing the Role of Arm Support During Robot-Assisted Leg Movements”, IEEE Robotics & Automation Magazine, vol. 27, no. 1, pp. 103–113, Jan. 2020.
- Lotti., M. Xiloyannis, G. Durandau, E. Galofaro, V. Sanguineti, L. Masia and M. Sartori, “Adaptive model-based myoelectric control for a soft wearable arm exosuit: A new generation of wearable robot control”, IEEE Robotics & Automation Magazine, vol. 27, no. 1, pp. 43–53, Jan. 2020.
- J.-B. Mignardot et al., “A multidirectional gravity-assist algorithm that enhances locomotor control after neurological disorders,” Science Translational Medicine, vol. 9, no. 399, Jul. 2017.
- B. Wagner et al., “Targeted neurotechnology restores walking in hu- mans with spinal cord injury,” Nature, vol. 563, no. 7729, Oct., pp. 65–71, 2018.
Myosuit
The Myosuit is a textile-powered lower-limb exoskeleton which represents a new approach to exoskeleton technology designed to support people with leg weakness. It supports rehabilitation training and activities of daily life such as walking, standing, sitting transfers, or climbing stairs. It is significantly simpler, lighter, and cheaper alternative to what is available on the market today.

Related publications
- Schmidt et al., “The Myosuit: Bi-articular Anti-gravity Exosuit That Reduces Hip Exten- sor Activity in Sitting Transfers” Front. Neurorobot., vol. 11, Oct. 2017.
- L. Haufe, K. Schmidt, J. E. Duarte, P. Wolf, R. Riener and M. Xiloyannnis. “Activity-based training with the Myosuit: a safety and feasibility study across diverse gait disorders.” Journal of neuroengineering and rehabilitation 17, no. 1 (2020): 1-11.
EES
NCCR Robotics developed a computational infrastructure combining real-time monitoring of neural signals associated to walking and control algorithms, with the ultimate goal of restoring walking through epidural electrical spinal cord stimulation (EES).
Grégoire Courtine and Silvestro Micera have collaborated in developing patient-specific stimulation algorithms to automatically tailor the EES parameters on each patient, and in creating wireless electrode implants that can be used to deliver precisely timed stimulation to the patient’s spinal cord.

Related publications
- B. Wagner, et al., “Targeted neurotechnology restores walking in humans with spinal cord injury”. Nature, vol. 563, no. 7729, 2018, pp. 65–71.
- Schiavone et al. “Soft, Implantable Bioelectronic Interfaces for Translational Research”. Advanced Materials, vol. 32, no. 17, p. 1906512, April 2020.
- Formento et al., “Electrical spinal cord stimulation must preserve proprioception to enable locomotion in humans with spinal cord injury”. Nature Neuroscience, vol. 21, no. 12, 2018., pp. 1728–1741, 2018.
Soft robotic components
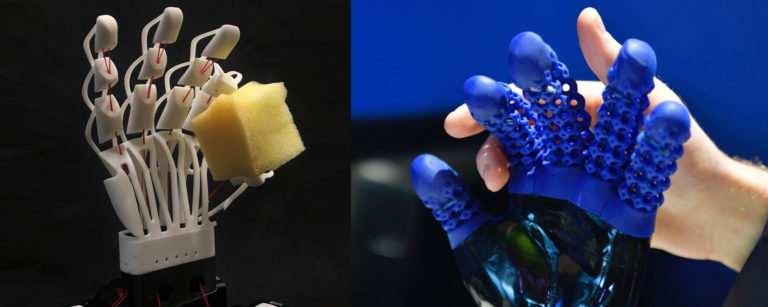
NCCR Robotics worked to advance the technology of body-worn transducers to assist and monitor the human body both in the context of the hospital and at home. These new components need to have comfort and compliance, wireless communication, distributed and miniaturized transducers with repeatable performance.
In particular, the work of NCCR robotics researchers focused on developing soft pressure sensors and proximity sensors, based on a manufacturing process that uses liquid metal as the core material. These sensors were integrated with the rubber band of the Myosuit, and used to quantify the motion of the user’s joints and to provide an accurate and comfortable way to monitor walking.
Related publications
- Dejace, N. Laubeuf, I. Furfaro, S. P. Lacour, “Gallium-based thin films for wearable human motion sensors”, Advanced Intelligent Systems, vol. 1, no. 5, 1900079, Aug. 2019.
- Hennig, J. Gantenbein, J. Dittli, H. Chen, S. P. Lacour, O. Lambercy, R. Gassert, “Development and Evaluation of a Sensor Glove to Detect Grasp Intention for a Wearable Robotic Hand Exoskeleton”, 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 2020, pp. 19-24, doi: 10.1109/BioRob49111.2020.9224463.
- A. Robertson, L. M. Dejace, S. P. Lacour, J. Paik, “Bi-modal control of vacuum-powered soft pneumatic actuators with embedded liquid metal-based strain sensitive skin “, in Proc. 2nd IEEE International Conference on Soft Robotics (RoboSoft), 2019, pp. 217-221.
- A. M Georgarakis, H. A. Sonar, M. D. Rinderknecht, W. L. Popp, J. E. Duarte, O. Lambercy, J. Paik, B. J. Martin, R. Riener and V. Klamroth-Marganska, “Age-dependent asymmetry of wrist position sense Is not influenced by stochastic tactile stimulation”, Frontiers in Human Neuroscience, vol. 14, p. 65, March 2020