
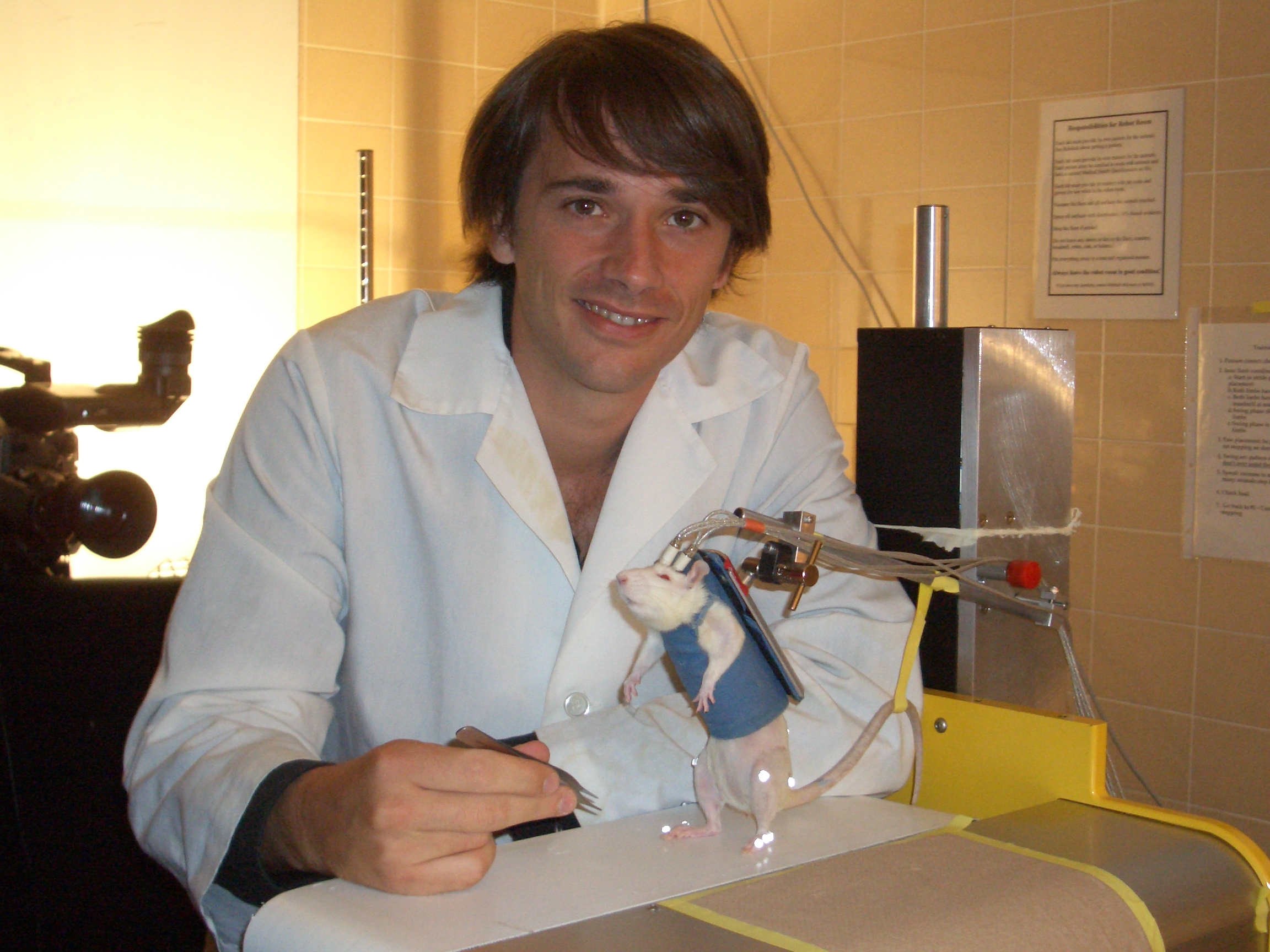
Getting into Robotics: Grégoire Courtine

My love for science dates back to my years in elementary school, when I passionately explored popular scientific works. I was watching the sky with my father looking for UFO, building physics experiments in my closet that I had transformed into a laboratory. I could spend my entire weekend in my wardrobe at the age of 9 years old in order to code very simple computer games on a TO7/70, which no one will remember…
This early fervor for Science and discoveries has been the enduring fuel that steered me towards studies in physics. I dreamed about becoming an astrophysicist who will discover life on other planets. In parallel, I was passionate about sports in general, in particular rock climbing to which I dedicated many hours almost every day. I also studied piano with dedication and developed a passion for opera and acting. In other words, I was a restless kid and passionate teenager who invested 100% of his energy in all the activities he was involved in. I believe that this behaviour never really stopped…
Did you always know that you wanted to study neuroscience or did you at any point consider other career paths?
As I explained above, I studied physics in college. While practicing rock climbing in the context of the university, I met a professor who was teaching the neural control of movement. He provided me with fascinating perspectives on the interactions between body mechanics and brain computing. He encouraged me to follow a Master in neuroscience.
How did you end up in research from there?
During my Master in Neuroscience, I became passionate about research. I spent every moment of free time and vacation conducting research studies and reading primary articles on the neural control of movement.I met a mentor, Prof Schieppati, who cultivated this emerging ardor for scientific studies. I published two primary papers during my Master programme, and decided to commit to a doctoral programme. To unify my love for space research and the neural control of movement, I studied the recovery of walking after travelling into space onboard the MIR space station.
Why did you become interested particularly in spinal cord injury?
During the course of my PhD, I became fascinated by Reggie Edgerton’s work on the control of locomotion in cats, to the point of joining his laboratory at UCLA in Los Angeles. I initially applied all the techniques I had developed during my PhD in a nonhuman primate model of spinal cord injury. This transfer of knowledge was a rapid success. Consequently, Reggie asked me to become a Research Associate for the Christopher and Dana Reeve Foundation. My work with the foundation coincided with my first exposure to the dramatic impact of spinal cord injury on the quality of life of people suffering this sudden trauma. From this moment, I decided to invest all my energy and research effort in developing pragmatic interventions to improve the quality of life of people with spinal cord injury.
What do you find frustrating in your research area?
I would separate two aspects, one directly related to spinal cord injury, and the other to science in general. Spinal cord injury research is inherently oscillating between basic and applied science. Yet, the translation of interventions that showed therapeutic efficacy in animal models to clinical applications has remained very frustrating. The high degree of variability between individuals and prohibited costs to test interventions in patients have so far impeded clinical translation. The second aspect is related to our peers. Global science is a highly competitive professional environment. Spinal cord injury is well-known to obey to this rule. The evaluation of publications, grants, promotions and many more aspects of our scientific career are conducted anonymously by your direct competitor. Imagine if Zidane, who is the coach of Real Madrid football team, would be referee for a game featuring Barcelona against any other team in Spain. Even with the best intentions and the more stringent ethic, it would be difficult for Zidane to remain impartial. When you reach the top of your research area, this situation occurs every day. Our system to evaluate and promote scientists and their work is reaching its limits.
{kind=link}
{kind=link}
What do you think are the greatest challenges for robotics in the future?
I will remain focused on gait rehabilitation robotics, which I am more familiar with. I think that over the past 20 years, robotic engineering has delivered a number of robotic interfaces to train the locomotor system. However, these robots have not yet realised the disruptive potential of robotics to augment the impact of rehabilitation after neurological disorders. Currently, exoskeletons are bourgeoning. Despite this rapidly expanding field of research and development, the majority of these interfaces keep focusing on the same fundamentally wrong principles, essentially denying the mechanisms through which the central nervous system controls locomotion. I believe that a key challenge for gait rehabilitation robotics is to deliver the next generation robot that synergistically interacts with and harnesses the remaining components of the central nervous system after neurological disorders.
What advice for those who would like to consider going into robotics research in the future? Robotics is not a field of research. Robots are built through teams of individuals from various fields of expertise such as mechanics, electronics, software, control algorithms, etc. that must work together to achieve what would not be possible by the sum of each individual. The key to realise this synergy is to understand the vocabulary of each of these engineers in order to ensure that they ultimately speak the same language. For this, next-generation scientists in robotics will need to broaden their fields of interest and expertise beyond the usual classical specialties in robotics.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}