
Robert Baines



Home Lab:
The Faboratory, with Prof. Rebecca Kramer-Bottiglio
Home University:
Yale University, USA
Visiting Lab:
Reconfigurable Robotics Lab (RRL), with Prof. Jamie Paik
Visiting University:
EPFL, Switzerland
Year of visit:
6 months in 2021
Project:
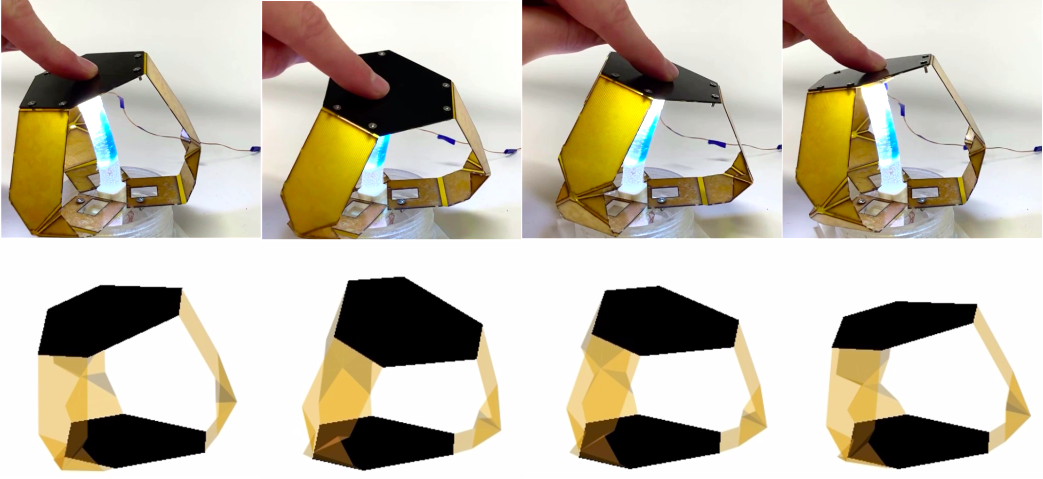
Multi-modal deformation and temperature sensing for context-sensitive machines
“I would like to thank the organizers of the NCCR program for their dedication to creating such a reputed and impactful program. I appreciate the opportunity of having gone to EPFL, where I was able to immerse myself in the research environment, make good friends, and explore the beauty of Switzerland. “
1. Were you able to fulfill all your planned objectives?
Yes, I finished all aspects of the collaboration, except one final demo that I will finish at my home university.
2. Did this experience inspire/enable you to continue your career?
Out of this experience, I will get a journal article published, and have made some strong academic/industrial connections at EPFL and in the Lausanne area.
3. Did your host lab contribute to the quality of your research?
All materials I needed for the project, I was able to source using lab funds. All tools and equipment for fabrication were available in top-notch facilities. Input from co-authors in lab provided expert lenses in biomechanics, exosuits, coding, and origami interface simulations. Guidance from the PI enabled creation of a strong paper and targeted experiments.
4. Do you feel your association with NCCR Robotics has had an overall impact on your studies and future career?
I was excited to attend NCCR-affiliated events, such as the Swiss Robotics Day. Attending these events exposed me to the wide cross-section of Swiss robotics industry, and professors from various Swiss institutions. I would be excited to return to Switzerland one day to take part in the academic or industrial scene.
5. What are you currently working on and what are your plans for the future?
I am finishing up the last demonstration for the exchange project: creating the first autonomously actuating, variable stiffness closed-loop position control soft robotic manipulator. After this demonstration is finished, I will be submitting the paper from the exchange project to Science Robotics. Fingers crossed! Regarding future plans, I want to pursue a post-doc. If the opportunity presents itself, I would certainly be interested in coming back to Switzerland for this.